
In dieser Challenge lernst du, wie du deinen LEGO Spike Prime Roboter zum Laufen bringst. Du wirst entdecken, wie man die Motoren anschließt, Bewegungen startet und stoppt, die Geschwindigkeit einstellt und genau vorgibt, wie weit sich der Roboter bewegen soll. Schauen wir uns dazu die wichtigsten Bewegungsbefehle an.
Die wichtigsten Bewegungsbefehle

Der wichtigste Bausteine ist der „weise Bewegungsmotoren zu“ Block. Mit diesem Block teilst du deinem Roboter mit an welchen Anschlüssen deine Motoren angeschlossen sind. Diesen Block solltest du immer an den Anfang deines Programmes stellen. Wenn du diesen Block vergisst kann dein Roboter nicht fahren.
Als nächstes brauchst du den Baustein „starte Bewegung“. Was dieser Block macht ist offensichtlich.
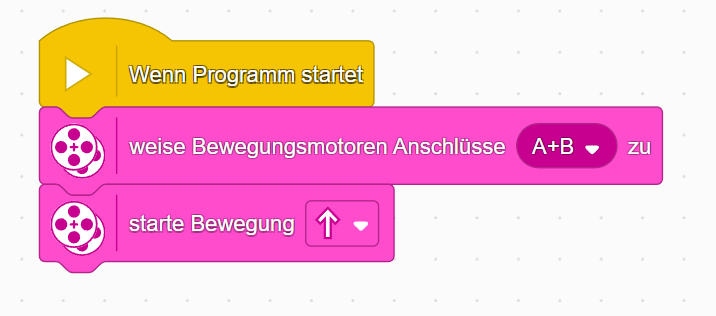
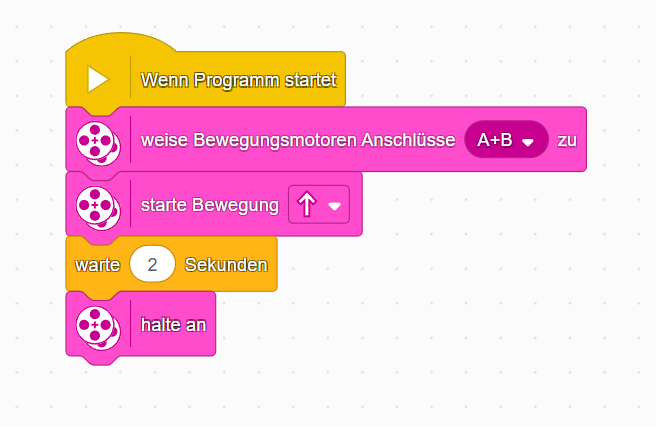
Ein mögliches Programm könnte also wie folgt aussehen. Probiere es aus.
Aber Achtung!!!
Dein Roboter hört gar nicht mehr auf zu fahren. Dafür brauchts du den „stoppe Bewegung“ Block.
Aber was passiert, wenn du das folgende Programm ausführst?
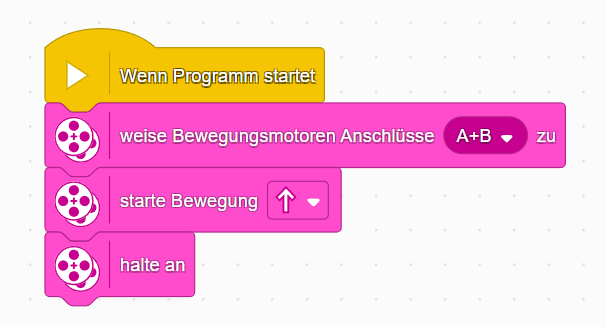
Richtig: Es passiert gar nichts.
Aber warum? Das Problem liegt darin, dass du zwischen dem Start und dem Stopp der Bewegung keine Wartezeit eingebaut hast. Probiere folgendes Programm:
Tipp: Den „warte“ Block findest du in der Kategorie Steuerung.
Aber was ist, wenn wir dem Roboter sagen wollen, dass er eine bestimmt Strecke fahren soll. Zum Beispiel: Fahre 50 cm. Dafür gibt es einen extra Block. Den „Bewege um“ Block.
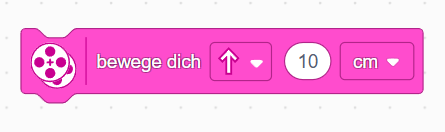
Tipp: In der Kategorie Bewegung findest du den „Bewege dich10 Umdrehungen“ Block. Wenn du auf das Dreieck tippst kannst du zu cm Wechseln.
Aufgabe:
Finde den „ändere Geschwindigkeit“ Block. Verwende diesen um ein Programm zu schreiben, welches deinen Roboter 10 cm nach vorne fahren lässt (50% Geschwindigkeit) und 20 cm nach hinten fahren lässt (100%).